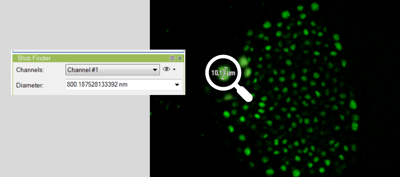
Measure the diameter of the objects of interest.
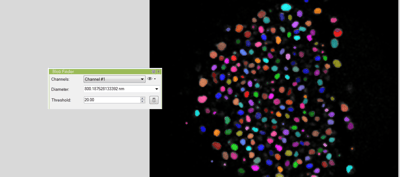
Adjust the Threshold to find the optimal results for segmentation using the preview function for immediate check of the selected parameters.
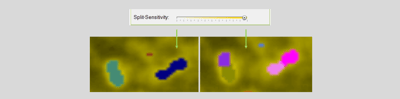
Adjust the splitting sensitivity to find the optimal results also of densely packed objects.
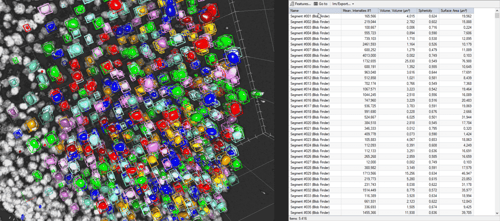
The Objects Table allows user to calculate various measurements based on the segmented objects. You can highlight individual or groups of objects interactively in the Objects Table and in the 2D and 4D Viewer to do proof reading or closer inspection.
The Objects Table allows to measure and sort by several features such as volume, sphericity, mean fluorescence intensity and many more parameters, including custom features using algebraic combinations of measurements and counts of objects or groups (e.g. ratio of mean intensities two channels).
The measurements can be visualized in the 4D Viewer using a color code and exported to Excel or via CSV to any other program for further statistical analysis.